The orbit reference frame defines the orientation of the orbital elements with respect to the central body. The reference frames available in FreeFlyer are described below. These reference frames can also be used when setting or getting a Spacecraft or CelestialObject's Keplerian or Cartesian state, using methods like Spacecraft.SetKeplerianState() and CelestialObject.GetCartesianStateAtEpoch(). The PositionConvert, VelocityConvert, and PositionVelocityConvert functions can be used to perform a rotational conversion of the position and velocity vectors between the different frames at a specified epoch.
FreeFlyer supports the following orbit reference frames, described on this page:
•Earth Frames: oInternational Celestial Reference System (ICRF) oCelestial Intermediate Reference Frame (CIRF) oLocal Coordinates - Longitude oLocal Coordinates - Longitude/Latitude
•Moon Frames: oMoon Principal Axis - Inertial at J2000 oMoon Fixed (Principal Axis Rotating) oMoon Principal Axis - Inertial at Epoch oMoon Mean Earth - Inertial at J2000 oMoon Mean Earth - Inertial at Epoch
•Generic CelestialObject Frames: |
For Spacecraft-referenced frames, see the Attitude Reference Frames page.
International Celestial Reference System (ICRF)
Description:
•Axes: The directions of the axes are fixed with respect to a set of extragalactic objects. The celestial reference system is constructed such that its principal plane is as close as possible to the Mean of J2000 Earth Equator and that the origin of the principal plane should be as close as possible to the dynamical equinox of J2000. •Origin: Spacecraft's Central Body |
The International Celestial Reference Frame (ICRF) is a fundamental reference frame defined by the the International Astronomical Union (IAU). The ICRF is considered the best realization of an inertial frame constructed to date, representing improvement upon the theory behind the J2000 frame. The ICRF axes are not dependent on the motion or orientation of the Earth, unlike the Mean of J2000 reference frame which depends on the Earth's equatorial and ecliptic planes.
The transformation between the inertial ICRF frame and earth fixed ITRF frame is computed in FreeFlyer using the Standards of Fundamental Astronomy (SOFA) Tools for Earth Attitude software library. By default, FreeFlyer uses an interpolated version of the IAU 2006/2000A earth orientation model but users can also access to the IAU 2006/2000B model. The IAU 2006/2000A and IAU 2006/2000B precession/nutation models and the Earth rotation angle are documented by IERS in the Technical Note No. 32, IERS Conventions 2003 and the Technical Note No. 36, IERS Conventions 2010.
Notes:
•Default reference frame. •Inertial frame. •This is the principal coordinate system used for computations in FreeFlyer. |
References:
1."IERS Conventions 2010," Luzum, B., & Petit, G., IERS Technical Note No. 36 (2010) |
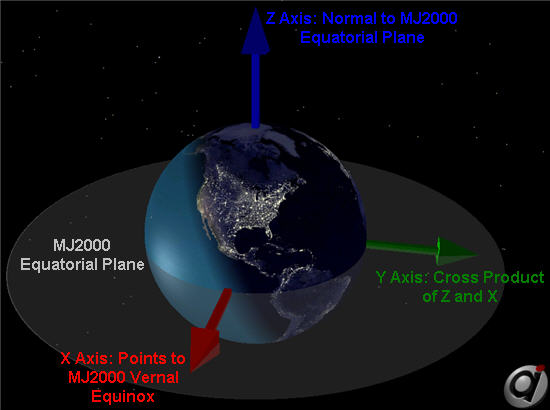
Mean of J2000 Earth Equator
Description:
•Z-axis: Vector normal to the mean equatorial plane at Julian year 2000.0, pointing towards the Northern Hemisphere •X-axis: Vector pointing from the center of the Earth to the mean vernal equinox at Julian year 2000.0 •Y-axis: Vector perpendicular to the x- and z-axes, forming a right-handed coordinate system •Origin: Center of the Earth |
Notes:
•Inertial frame. |
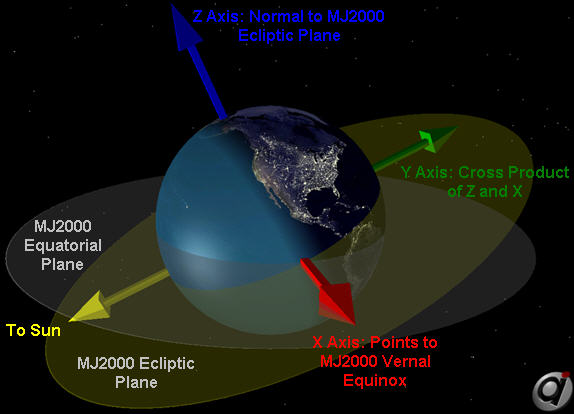
Mean of J2000 Earth Ecliptic
Description:
•Z-axis: Vector normal to the ecliptic plane at Julian year 2000.0, pointing toward the Northern Hemisphere •X-axis: Vector pointing from the center of the Earth to the mean vernal equinox at Julian year 2000.0 •Y-axis: Vector perpendicular to the x- and z- axes, forming a right-handed coordinate system •Origin: Center of the Earth |
Notes:
•Inertial frame. |
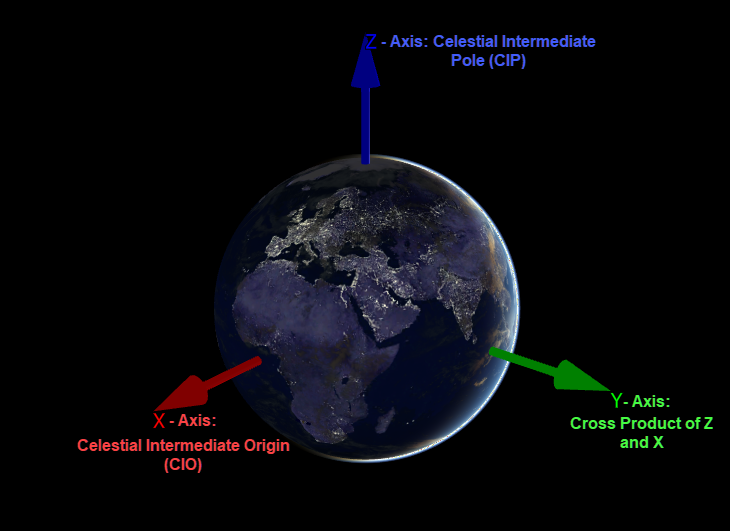
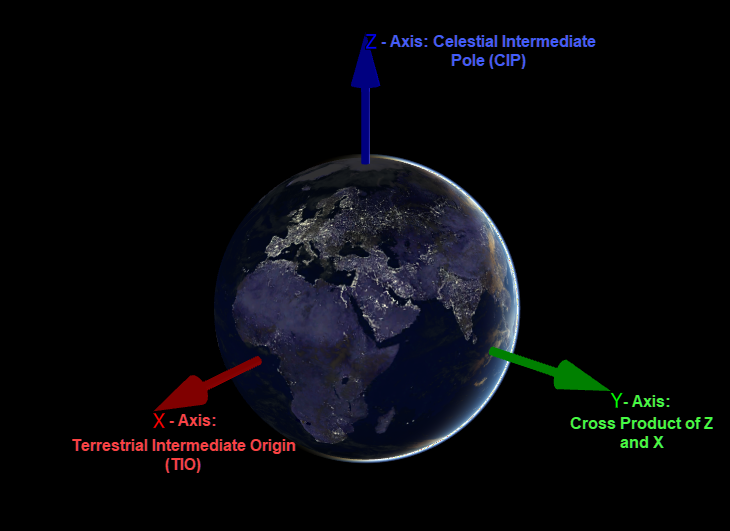
Celestial Intermediate Reference Frame (CIRF)
Description:
•Z-axis: Celestial Intermediate Pole (CIP) •X-axis: Celestial Intermediate Origin (CIO) •Y-axis: Vector perpendicular to the x- and z- axes, forming a right-handed coordinate system •Origin: Spacecraft's Central Body |
A geocentric coordinate system based on the current position of the celestial pole with right ascension measured from the Celestial Intermediate Origin (CIO) instead of the equinox. The CIO is a point on the the celestial equator that currently aligns closely with the prime meridian of the International Celestial Reference Frame (ICRF).
Notes:
•Non-rotating frame |
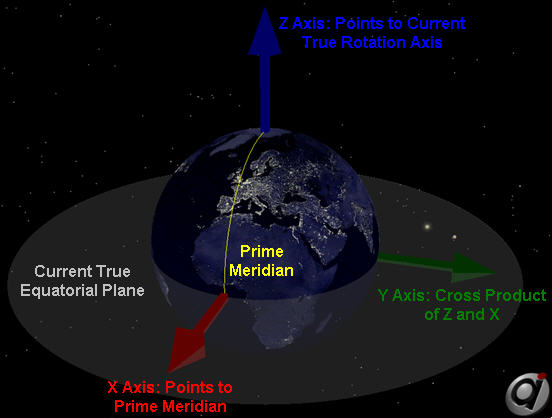
Earth Fixed
Description:
•Z-axis: Points toward the true rotation axis at the current epoch •X-axis: Vector from the center of the Earth to the intersection of the prime meridian with the true equatorial plane •Y-axis: Vector perpendicular to the x- and z- axes, forming a right-handed coordinate system •Origin: Center of the Earth |
Notes:
•Rotating frame. •The Earth Fixed reference frame will also include polar motion effects if enabled:
•If polar motion modeling is not enabled, the Earth Fixed reference frame is equivalent to the True of Date Rotating reference frame (commonly known as Terrestrial Intermediate Reference Frame). |
True of Date Earth Equator
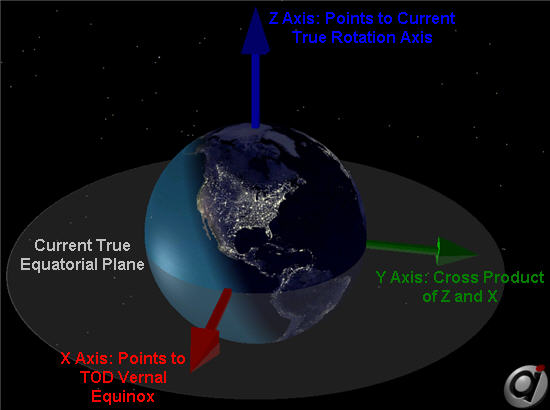
Description:
•Z-axis: Points toward the true rotation axis at the current epoch •X-axis: Points toward the true vernal equinox at the current epoch •Y-axis: Vector perpendicular to the x- and z- axes, forming a right-handed coordinate system •Origin: Center of the Earth |
Notes:
•Directions of the coordinate system axes are time dependent •The "true" reference frames include nutation and precession effects. The user can control when the nutation and precession matrices are updated using the FF_SolarSystem.CIRFEvaluationMode property (available only in the FF_SolarSystem object dialog). |
True Equator Mean Equinox
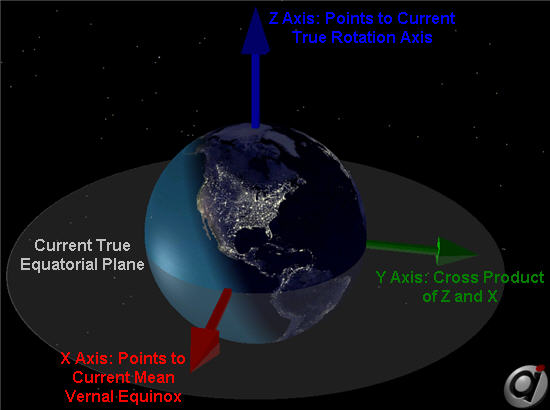
Description:
•Z-axis: Points toward the true rotation axis at the current epoch •X-axis: Points toward the mean vernal equinox at the current epoch •Y-axis: Vector perpendicular to the x- and z-axes, forming a right-handed coordinate system •Origin: Center of the Earth |
Local Coordinates - Longitude
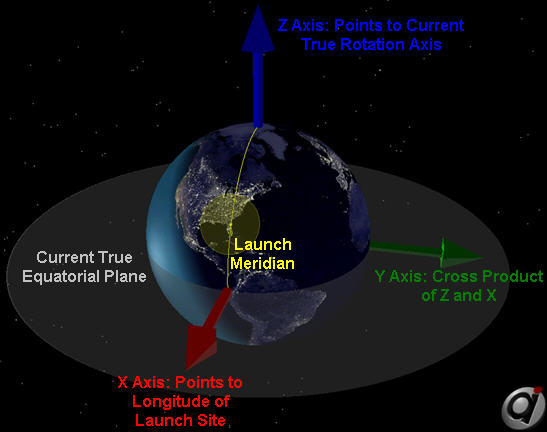
Description:
•Z-axis: Points toward the true rotation axis at the reference epoch •X-axis: Lies in the true equatorial plane at the reference epoch, pointing from the center of the Earth to the reference longitude (usually the longitude of the launch site) •Y-axis: Vector perpendicular to the x- and z- axes, forming a right-handed coordinate system •Origin: Center of the Earth |
Notes:
•Launch vehicle trajectory can be designed without regard to launch time and date •In FreeFlyer 6.6 and earlier, this reference frame was referred to as "Launch Coordinates" |
// Set the reference Epoch and Location of Launch Site Spacecraft1.LCSEpoch = "Jan 01 2020 00:00:00.000".ParseCalendarDate(); Spacecraft1.LCSLongitude = GroundStation1.Longitude; Spacecraft1.LCSLatitude = GroundStation1.Latitude; |
Local Coordinates - Longitude/Latitude
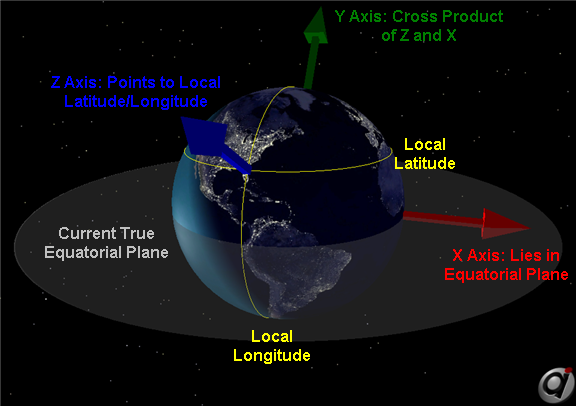
Description:
•Z-axis: Points from the center of the Earth to the reference longitude and geodetic latitude •X-axis: Lies in the true equatorial plane at the reference epoch •Y-axis: Vector perpendicular to the x- and z- axes, forming a right-handed coordinate system •Origin: Center of the Earth |
Notes:
•Launch vehicle trajectory can be designed without regard to launch time and date •In FreeFlyer 6.6 and earlier, this reference frame was referred to as "UVW Coordinates" |
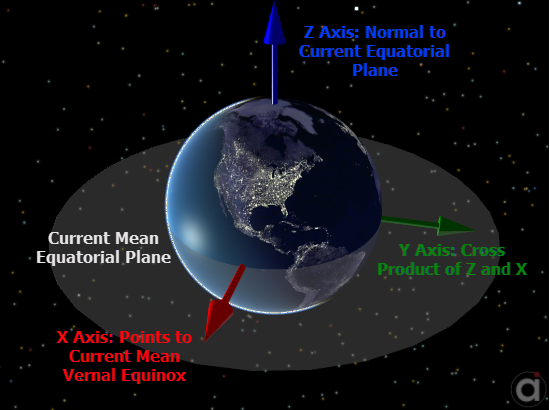
Mean of Date Earth Equator
Description:
•Z-axis: Vector normal to the mean equatorial plane at the current epoch •X-axis: Vector pointing from the center of the Earth to the mean vernal equinox at the current epoch •Y-axis: Vector perpendicular to the x- and z-axes, forming a right-handed coordinate system •Origin: Center of the Earth |
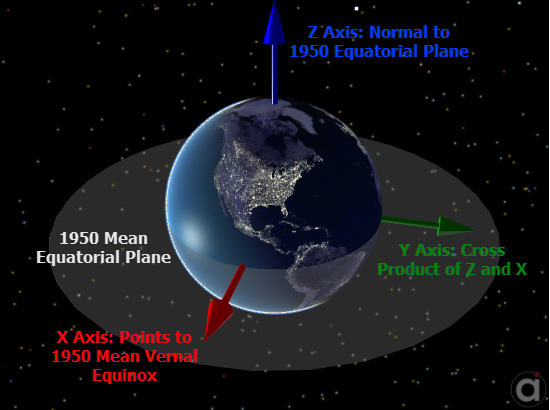
Mean of 1950 Earth Equator
Description:
•Z-axis: Vector normal to the mean equatorial plane at 12:00:00 on January 1, 1950 •X-axis: Vector pointing from the center of the Earth to the mean vernal equinox at 12:00:00 on January 1, 1950 •Y-axis: Vector perpendicular to the x- and z-axes, forming a right-handed coordinate system •Origin: Center of the Earth |
True of Date Rotating
Description:
•Z-axis: Celestial Intermediate Pole (CIP) •X-axis: Terrestrial Intermediate Origin (TIO) •Y-axis: Vector perpendicular to the x- and z- axes, forming a right-handed coordinate system •Origin: Spacecraft's Central Body |
Notes:
•Rotating frame. •This is nearly equivalent to the Earth Fixed reference frame, but does not include polar motion effects. •Commonly referred to as Terrestrial Intermediate Reference Frame (TIRF) |
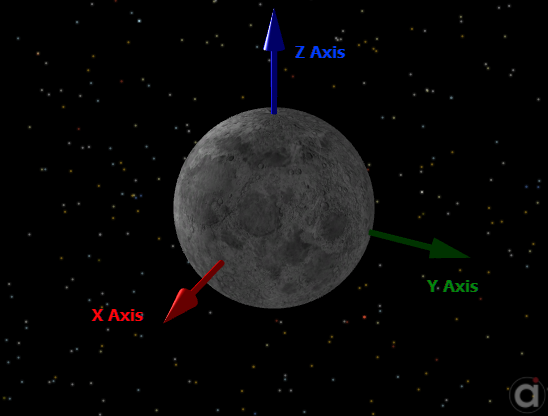
Moon Principal Axis - Inertial at J2000
Description:
•The Moon PA frame evaluated at the J2000 epoch (Jan 01 2000 12:00:00.000 TDB). The frame is treated as stationary at the J2000 epoch and is not rotating. •Origin: Center of the Moon |
Notes:
•Default reference frame. •Inertial frame. |
Moon Fixed (Principal Axis Rotating)
Description:
•The rotating Moon PA (Principal Axis) frame, as defined by the JPL planetary ephemeris. •Origin: Center of the Moon |
Notes:
•Rotating frame. •The Moon ME frame has a constant rotational offset with respect to the Moon PA frame. The rotational offset is defined in the JPL planetary ephemeris. •This frame is based on the lunar principal axes, and differs from the Moon ME frame by about 1 km at the lunar surface. |
Moon Principal Axis - Inertial at Epoch
Description:
•The Moon PA frame evaluated at a user-specified epoch. The frame is treated as stationary at the specified epoch and is not rotating. •Origin: Center of the Moon |
Notes:
•Inertial frame. |
Moon Mean Earth - Rotating
Description:
•The rotating Moon ME (Mean Earth) frame, as defined by the JPL planetary ephemeris. •Origin: Center of the Moon |
Notes:
•Rotating frame. •The Moon ME frame has a constant rotational offset with respect to the Moon PA frame. The rotational offset is defined in the JPL planetary ephemeris. •The Moon ME frame differs from the Moon PA frame by about 1 km at the lunar surface. |
Moon Mean Earth - Inertial at J2000
Description:
•The Moon ME frame evaluated at the J2000 epoch (Jan 01 2000 12:00:00.000 TDB). The frame is treated as stationary at the J2000 epoch and is not rotating. •Origin: Center of the Moon |
Notes:
•Inertial frame. |
Moon Mean Earth - Inertial at Epoch
Description:
•The Moon ME frame evaluated at a user-specified epoch. The frame is treated as stationary at the specified epoch and is not rotating. •Origin: Center of the Moon |
Notes:
•Inertial frame. |
CelestialObject Inertial Equatorial J2000
Description:
•The CelestialObject body frame evaluated at the J2000 epoch (Jan 01 2000 12:00:00.000 TDB). The frame is treated as stationary at the J2000 epoch and is not rotating. oFor the Earth, this maps to the ICRF frame. oFor the Moon, this maps to the Moon PA - Inertial at J2000 frame. oFor other CelestialObjects, this is defined based on the IAU/IAG Attitude model for that body. •Origin: Center of the CelestialObject |
Notes:
•Default reference frame. •Inertial frame. •The identifier for this frame can be accessed using the syntax shown below. See the Celestial Object Reference Frame IDs summary for more information.
|
CelestialObject Body Fixed
Description:
•The rotating CelestialObject body-fixed frame for the specified CelestialObject. oFor the Earth, this maps to the Earth-Fixed frame. oFor the Moon, this maps to the Moon-Fixed (Principal Axis rotating) frame. oFor other CelestialObjects, this is defined based on the IAU/IAG Attitude model for that body. See the Modeling Solar System Objects section of the Solar System page for more information. •Origin: Center of the CelestialObject |
Notes:
•Rotating frame. •The identifier for this frame can be accessed using the syntax shown below. See the Celestial Object Reference Frame IDs summary for more information.
|
CelestialObject Inertial Equatorial At Epoch
Description:
•The CelestialObject body frame evaluated at a user-specified epoch. The frame is treated as stationary at the specified epoch and is not rotating. oFor the Earth, this frame is defined based on the Earth-Fixed frame, "inertialized" (not rotating) at the specified epoch. oFor the Moon, this maps to the Moon PA - Inertial at Epoch frame. oFor other CelestialObjects, this is defined based on the IAU/IAG Attitude model for that body. •Origin: Center of the CelestialObject |
Notes:
•Inertial frame. •The identifier for this frame can be accessed using the syntax shown below. See the Celestial Object Reference Frame IDs summary for more information.
|
See Also
oCelestial Object Reference Frame IDs
•Solar System Modeling