The Attitude Reference Frame defines the coordinate system that the Ground Vehicle's attitude is referenced to. The reference frames available in FreeFlyer are described below. The AttitudeConvert function can be used to convert attitudes between the different systems. The GroundVehicle Attitude Reference Frames available in FreeFlyer are:
International Celestial Reference Frame (ICRF)
Description:
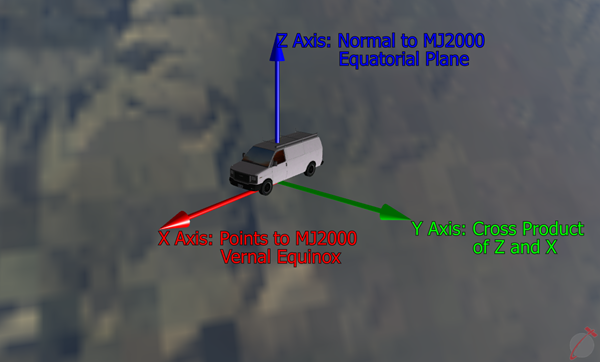
•Axes: The directions of the axes are fixed with respect to a set of extragalactic objects. The celestial reference system is constructed such that its principal plane is as close as possible to the Mean of J2000 Earth Equator and that the origin of the principal plane should be as close as possible to the dynamical equinox of J2000. •Origin: Spacecraft's Central Body |
Notes:
|
•Inertial frame. •This is the principal coordinate system used for computations in FreeFlyer. |
References:
1."IERS Conventions 2010," Luzum, B., & Petit, G., IERS Technical Note No. 36 (2010) |
Prior to setting the Ground Vehicle's attitude state, its attitude reference frame must be set:
GroundVehicle1.AttitudeRefFrame = "ICRF"; |
VLT
Description:
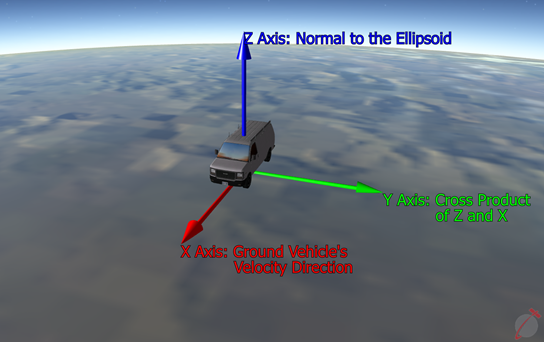
•X-axis: Vector pointing in the direction of the body-fixed velocity of the GroundVehicle •Y-axis: Vector perpendicular to the GroundVehicle's z-axis and x-axis, forming a right-handed coordinate system •Z-axis: Vector pointing in the direction normal to the reference ellipsoid at the central body fixed position of the GroundVehicle •Origin: Center of the GroundVehicle |
Notes:
•In the case that the VLT frame is not defined, it will fall back to the ENU frame. •When using terrain the Z-axis is defined as the normal to the terrain at the location of the GroundVehicle on the terrain. |
Prior to setting the Ground Vehicle's attitude state, its attitude reference frame must be set:
GroundVehicle1.AttitudeRefFrame = "VLT"; |
ENU
Description:
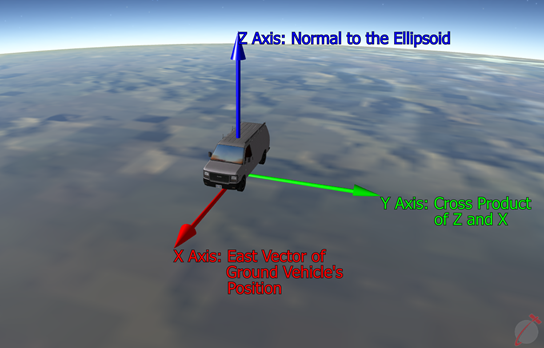
•X-axis (East): Vector pointing in the east direction of the Ground Vehicle's position vector •Y-axis (North): Vector perpendicular to the GroundVehicle's z-axis and x-axis, forming a right-handed coordinate system •Z-axis (Up): Vector pointing in the direction normal to the reference ellipsoid at the central body fixed position of the GroundVehicle •Origin: Center of the GroundVehicle |
Notes:
•In the case that the ENU frame is not defined (at the Poles), the frame will fall back to x pointing along the prime-meridian, z pointing along the body-fixed z-axis, and y completing the triad. |
Prior to setting the Ground Vehicle's attitude state, its attitude reference frame must be set:
GroundVehicle1.AttitudeRefFrame = "ENU"; |
See Also
•GroundVehicle Attitude Systems